 国际站
国际站 美国国家标准技术研究所(NIST)离子量子计算研究团队开发了多离子链中集体振动模式(声子模式)的精密量子操控技术,实现了频率不同的声子模式间的高保真度相干耦合,并设计验证了声子模式的非破坏性量子测量方案。7月29日,该研究成果以「Coherent coupling and non-destructive measurement of trapped-ion mechanical oscillators」为题在线发表于Nature Physics。论文的第一作者兼通讯作者是该团队博士后侯攀宇,现为清华大学交叉信息研究院助理教授,另一通讯作者是Dietrich Leibfried博士。
量子信息科技利用量子力学的独特性质,如量子叠加和量子纠缠,推动计算、通信和传感等领域的创新,具有广阔的应用前景。这些应用依赖于在微观尺度下对物理系统的精密操控和测量。离子系统是量子计算和精密测量领域的重要系统之一,以其超长的相干时间以及高保真量子态制备、操控和测量能力而著称。然而,已有的量子操控研究主要集中在离子内部电子态的控制,而缺乏对外部振动模式量子操控的研究,这限制了诸多基于离子系统的应用,包括基于移动离子的可扩展量子计算,量子计量和量子传感,以及基于玻色码的量子纠错和计算。
最近,NIST研究团队在离子声子模式的量子调控取得了重大进展。研究人员实现了在离子声子模式间单量子级别的高保真相干耦合。通过产生具有特定空间变化的振荡电势场,他们能够控制耦合的时间、强度和相位。耦合速率可远大于退相干速率,从而能够实现高保真的量子态传输、声子模态间的量子纠缠,以及Hong-Ou-Mandel干涉。此外,研究人员巧妙地利用离子晶体的对称性设计并验证了声子模式量子态的非破坏性测量,这对于实现基于连续变量量子纠错至关重要。可控的声子模式和测量在连续变量量子信息处理、量子模拟和精密测量中具有潜在的应用,还可以加速离子声子模态的冷却和逻辑门等基础操作,对于离子阱系统的众多研究方向都有积极推进作用。
离子声子模式相干耦合技术
相比于传统的利用激光诱导的间接耦合技术,该研究的创新之处在于对离子振动态进行直接操控,因而更加普适,在无法利用激光的情况下仍然适用。典型案例包括量子纠错中存储了量子信息的离子比特;不能被激光直接操控的粒子,例如许多分子离子、电子以及宏观带电粒子等。此外,该技术具有更高的稳定性,抗噪性,容易实现更高的保真度,这对于量子信息应用至关重要。通过数值模拟和电子学控制技术,研究人员通过控制离子阱电极的电压(如图1所示)对电势场在微米尺度(约为离子间距)进行精确控制,成功在不同离子链中实现了各种振动模式间的相干耦合以及多种量子逻辑操作。
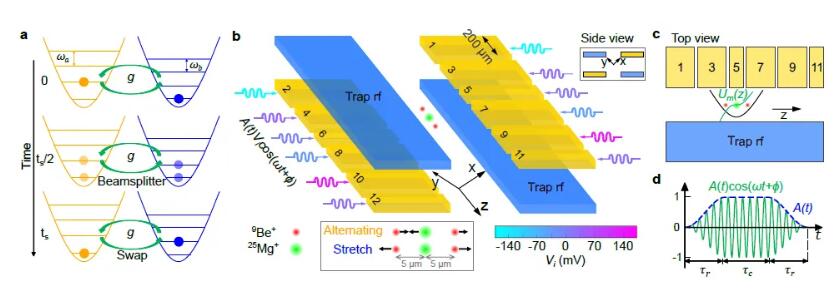
图1| 离子链中不同声子模式间相干耦合的原理和实验方案。
如图2所示,研究人员实现了约99.5%保真度的高维量子态传输,产生了保真度高于98%的玻色模式间的量子纠缠态,并且还观察到了两个可分辨的声子间的Hong-Ou-Mandel干涉,这一通常只能在全同粒子上观察到的量子现象。
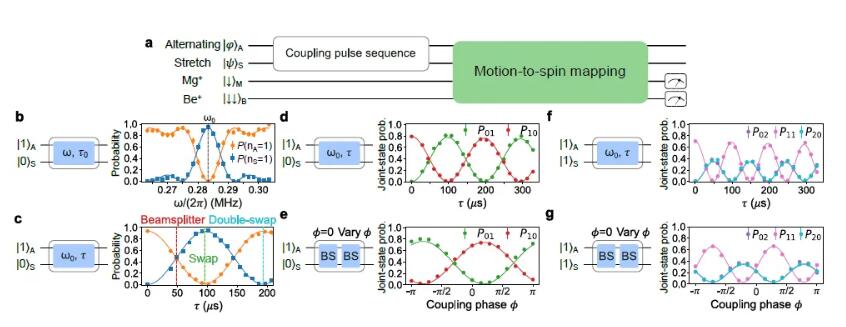
图2| 声子模式间相干耦合实验验证。
离子声子模式的非破坏性测量
量子纠错通常利用多个「二能级」物理单元来实现一个有纠错能力的量子比特(逻辑量子比特)。另一种较为新颖的方法是在量子谐振子中编码信息,如超导微波腔或离子振动模式。一个量子谐振子即可编码一个逻辑量子比特,大大减少了资源需求和操作复杂性。这种方式被称为玻色纠错码,在超导系统中已实现超越「盈亏平衡点」的量子纠错。在离子系统中,由于测量时离子辐射出的光子会对离子造成巨大的反冲作用,破坏离子振动态中储存的信息。因此,实现离子振动态的非破坏性测量被认为几乎是「不可能」的任务,限制了探索玻色纠错码的可行性。
在该研究中,作者提出并验证了一种利用离子链的对称性和量子态交换技术来实现非破坏性测量的方案,解决了这一长期困扰离子系统的难题,为实现容错量子计算提供了新路径。在该方案中,量子态可以在两种不同的振动模式间被相干传递,以实现将量子信息有效投影到离子电子态,并在探测过程中保护量子信息的目的。这项技术还有助于提高量子传感的测量保真度。
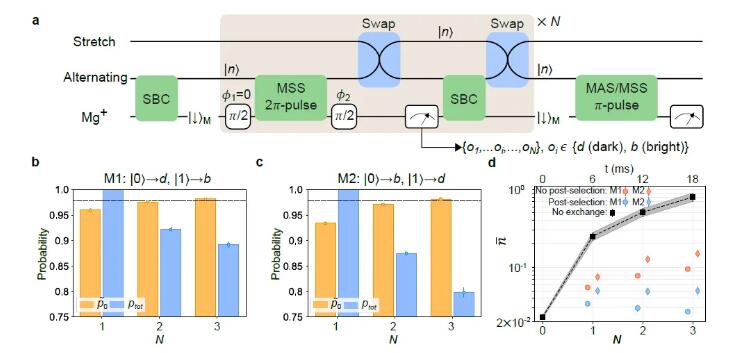
图3| 声子量子态的非破坏性测量。
论文信息
Hou, PY., Wu, J.J., Erickson, S.D. et al. Coherent coupling and non-destructive measurement of trapped-ion mechanical oscillators.Nat. Phys. (2024).
论文链接:
https://doi.org/10.1038/s41567-024-02585-y
https://www.nature.com/articles/s41567-024-02585-y
来源:小柯物理,爱科会易仅用于学术交流